5.7 — Fourier Transform¶
এই অধ্যায়ে কী শিখব: FT on L¹/L², inversion formula
উৎস (source): Fourier; Plancherel।
১. কেন শিখব? (Motivation)¶
গত কয়েকটা অধ্যায়ে আমরা Hilbert space, orthonormal basis, আর Fourier series শিখেছি — কিন্তু সব কিছুই ছিল বৃত্তের উপর, অর্থাৎ periodic function-এর দুনিয়ায়। এখন আমরা সেই পরিচিত দুনিয়া থেকে বেরিয়ে পুরো বাস্তব সংখ্যারেখা \(\mathbb{R}\)-এর উপর আসব।
প্রশ্ন হলো: কোনো function \(f(x)\) যদি পুরো \(\mathbb{R}\)-এ সংজ্ঞায়িত থাকে — যেমন একটা radio signal যা সব সময়ের জন্য বিদ্যমান — তাহলে তার "frequency content" কীভাবে বের করব? Fourier series কাজ করে না, কারণ \(f\) periodic নয়।
উত্তরটাই হলো Fourier transform (ফুরিয়ে রূপান্তর)। যেখানে Fourier series-এ ছিল একটা discrete set of frequencies \(\{n\}_{n \in \mathbb{Z}}\), সেখানে Fourier transform-এ থাকে একটা continuous spectrum — প্রতিটা real number \(\xi\) একটা সম্ভাব্য frequency।
এর প্রয়োগ সর্বত্র:
- Signal processing: MP3, JPEG, WiFi — সব কিছুতেই Fourier transform।
- Quantum mechanics: Heisenberg uncertainty principle Fourier transform-এর একটা মৌলিক পরিণতি।
- PDE-র সমাধান: তাপ সমীকরণ, তরঙ্গ সমীকরণ — Fourier transform দিয়ে সহজে সমাধান।
- Probability theory: Characteristic function হলো probability measure-এর Fourier transform।
মূল স্বজ্ঞা
Fourier transform হলো time/space domain থেকে frequency domain-এ যাওয়ার একটা "ভাষা-বদল"। একই function দুটো ভাষায় লেখা — একটায় বলছ "কোথায় কতটা আছে", অন্যটায় "কোন কম্পনে কতটা আছে"।
২. মূল ধারণা (Core idea)¶
Time-domain বনাম Frequency-domain¶
ভাবো একটা সঙ্গীতের শব্দকে তুমি record করলে। Waveform (তরঙ্গরূপ) হলো time-domain representation — সময়ের সাথে চাপের পরিবর্তন। কিন্তু একজন musician চিন্তা করেন notes-এ, অর্থাৎ frequencies-এ। Piano-তে "মধ্যম সা" মানে \(262\) Hz, "পঞ্চম" মানে \(392\) Hz — এটা frequency-domain।
Fourier transform ঠিক এই কাজটাই করে: \(f(x)\) নামের waveform-কে \(\hat{f}(\xi)\) নামের spectrum-এ বদলে দেয়।
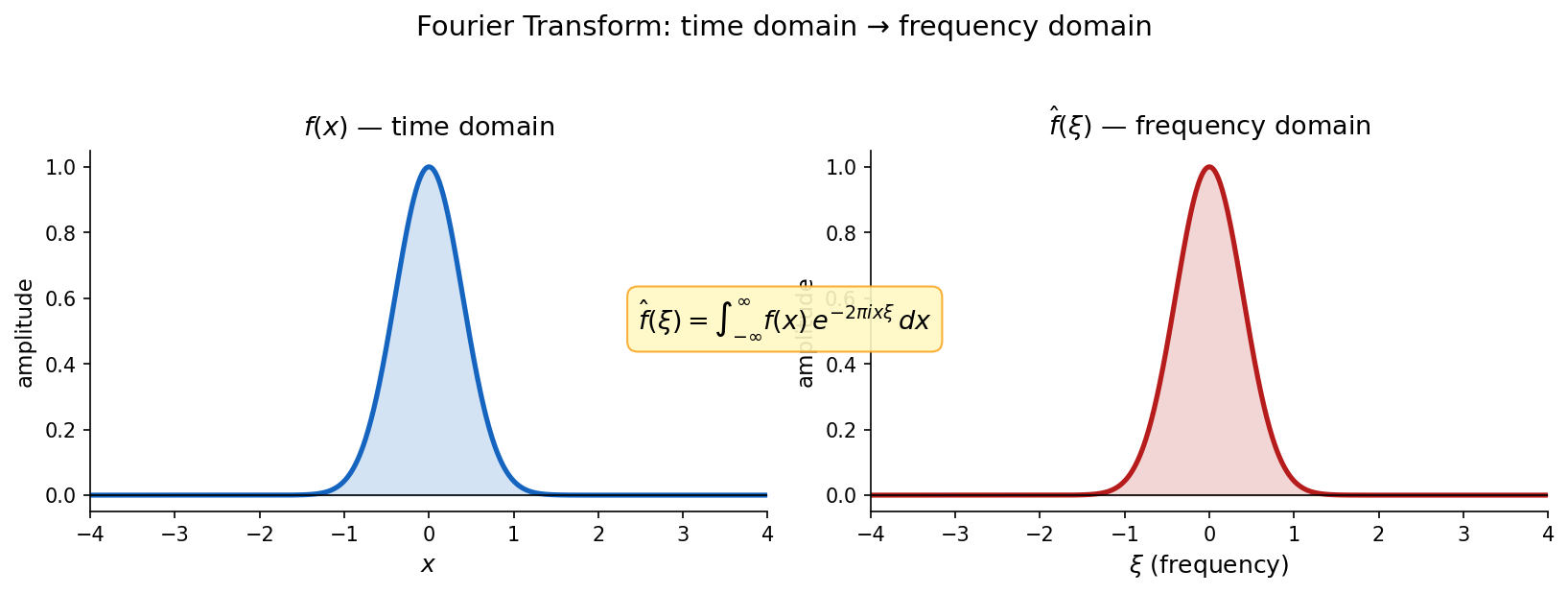
চিত্র ১: বাঁয়ে time-domain-এ function \(f(x)\); ডানে Fourier transform \(\hat{f}(\xi)\) তার frequency-domain প্রতিনিধি। উপরে integral সূত্রটা দেখানো হয়েছে।
Complex exponential — Fourier-এর মূল হাতিয়ার¶
Fourier series-এ যেমন \(e^{2\pi i n x}\) ছিল orthogonal basis, এখানেও সেই একই idea — কিন্তু continuous frequency \(\xi \in \mathbb{R}\):
এই function হলো frequency \(\xi\)-এর একটা "pure tone"। \(f(x)\)-কে এই tone-এর সাথে গুণ করে integrate করলে পাওয়া যায় \(f\)-এ সেই frequency-র কতটা উপস্থিতি — এটাই \(\hat{f}(\xi)\)।
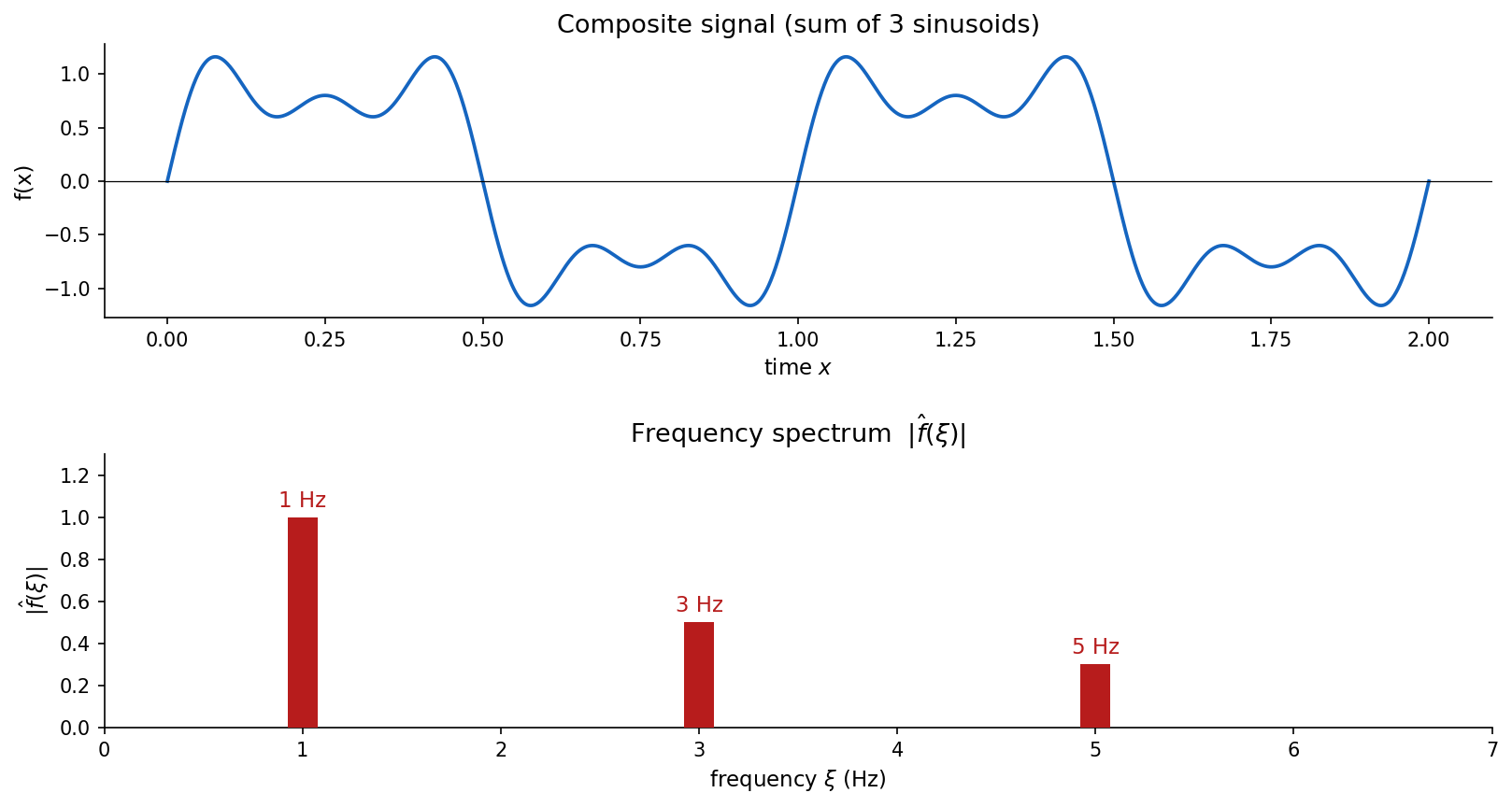
চিত্র ২: উপরে ৩টা sinusoid-এর মিশ্রণ (১, ৩, ৫ Hz); নিচে তার Fourier spectrum — ঠিক সেই তিনটি frequency-তে spike।
৩. সংজ্ঞা ও উপপাদ্য (Definitions & Theorems)¶
Fourier Transform-এর সংজ্ঞা¶
সংজ্ঞা: Fourier Transform (ফুরিয়ে রূপান্তর)
\(f \in L^1(\mathbb{R})\) হলে \(f\)-এর Fourier transform \(\hat{f} : \mathbb{R} \to \mathbb{C}\) সংজ্ঞায়িত হয়:
আমরা \(\mathcal{F}[f] = \hat{f}\) notation-ও ব্যবহার করব। (Axler 11.47)
নোট: \(\lvert e^{-2\pi i x \xi} \rvert = 1\) সবসময়, তাই \(\lvert \hat{f}(\xi) \rvert \leq \lVert f \rVert_1\) — অর্থাৎ integral সংজ্ঞিত।
Convention প্রসঙ্গে: Sternberg-এর বইতে \(\hat{f}(\xi) = \frac{1}{\sqrt{2\pi}} \int f(x) e^{-ix\xi}\, dx\) convention ব্যবহার করা হয়। আমরা Axler-এর convention অনুসরণ করছি (factor \(2\pi\) exponent-এ), যা Lebesgue theory-র সাথে সবচেয়ে সুন্দর মেলে।
Riemann–Lebesgue Lemma¶
উপপাদ্য: Riemann–Lebesgue Lemma (রিম্যান–লেবেগ লেমা)
\(f \in L^1(\mathbb{R})\) হলে:
- \(\hat{f}\) uniformly continuous (সমভাবে সন্তত) on \(\mathbb{R}\)।
- \(\lVert \hat{f} \rVert_\infty \leq \lVert f \rVert_1\)।
- \(\displaystyle\lim_{\xi \to \pm\infty} \hat{f}(\xi) = 0\)। (Axler 11.49)
স্বজ্ঞা: frequency অনেক বেশি হলে \(e^{-2\pi i x \xi}\) দ্রুত দোলায় — গড় হিসেবে positive আর negative অংশ cancel করে, তাই \(\hat{f}(\xi) \to 0\)।
উদাহরণ ১: Gaussian \(\to\) Gaussian¶
উদাহরণ ১: Gaussian-এর Fourier transform
\(f(x) = e^{-\pi x^2}\) হলে \(\hat{f}(\xi) = e^{-\pi \xi^2}\)।
অর্থাৎ: \(f = \hat{f}\) — Gaussian নিজেই নিজের Fourier transform!
প্রমাণের স্কেচ (Axler 11.51–11.53): \(f' = -2\pi x f\) লক্ষ করি। Fourier transform-এর derivative rule (11.50) থেকে \((\hat{f})' = -2\pi i \widehat{xf}\), আর \(\widehat{xf}\) integration by parts দিয়ে \(\frac{i}{2\pi} \widehat{f'}\)। এই দুটো মিলিয়ে দেখা যায় \((\hat{f})'(\xi) = -2\pi \xi \hat{f}(\xi)\) — অর্থাৎ \(\hat{f}\) আর \(f\) একই ODE সমাধান করে! \(\hat{f}(0) = \int e^{-\pi x^2}\, dx = 1 = f(0)\) ব্যবহার করলে \(\hat{f} = f\)।
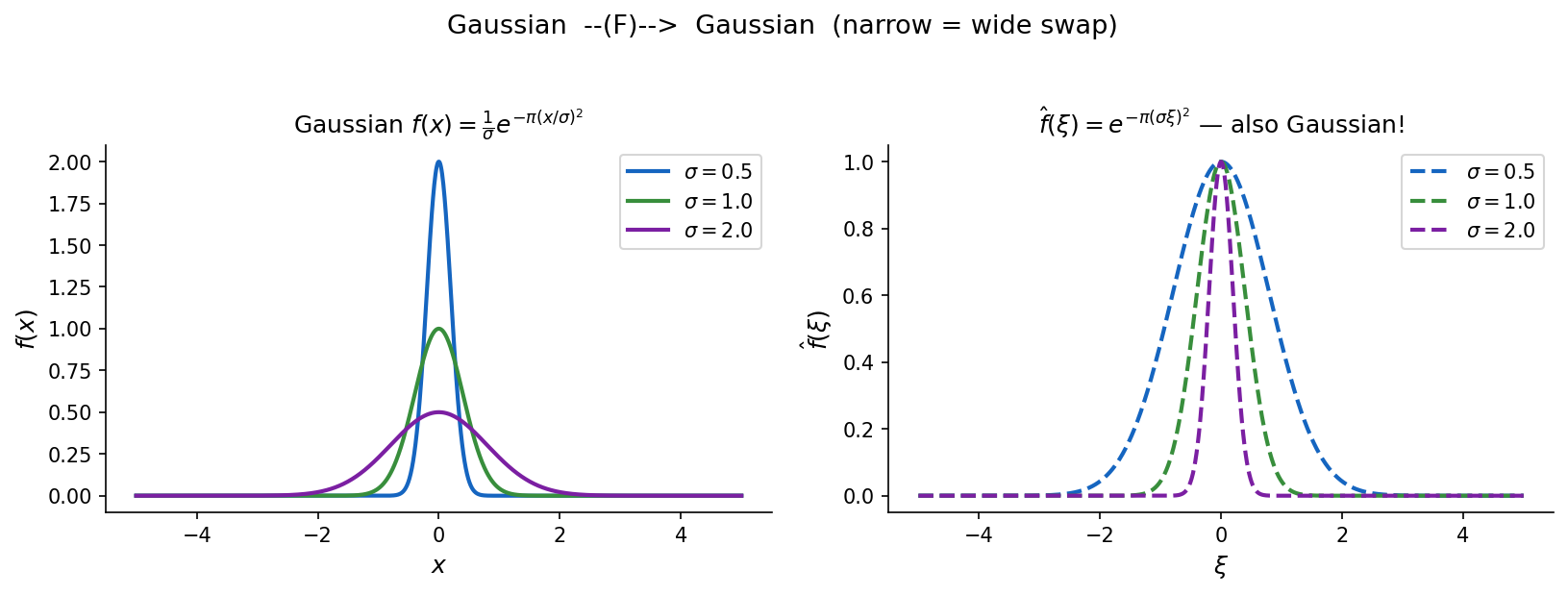
চিত্র ৩: বিভিন্ন \(\sigma\)-র Gaussian। বাঁয়ে time-domain, ডানে frequency-domain। \(\sigma\) ছোট হলে (সংকীর্ণ) frequency-তে প্রশস্ত হয় — uncertainty principle-এর প্রথম ইঙ্গিত।
উদাহরণ ২: Box function \(\to\) sinc¶
উদাহরণ ২: Indicator function-এর Fourier transform
\(f = \mathbf{1}_{[-a,a]}\) (box function) হলে:
যেখানে \(\mathrm{sinc}(u) = \frac{\sin(\pi u)}{\pi u}\)।
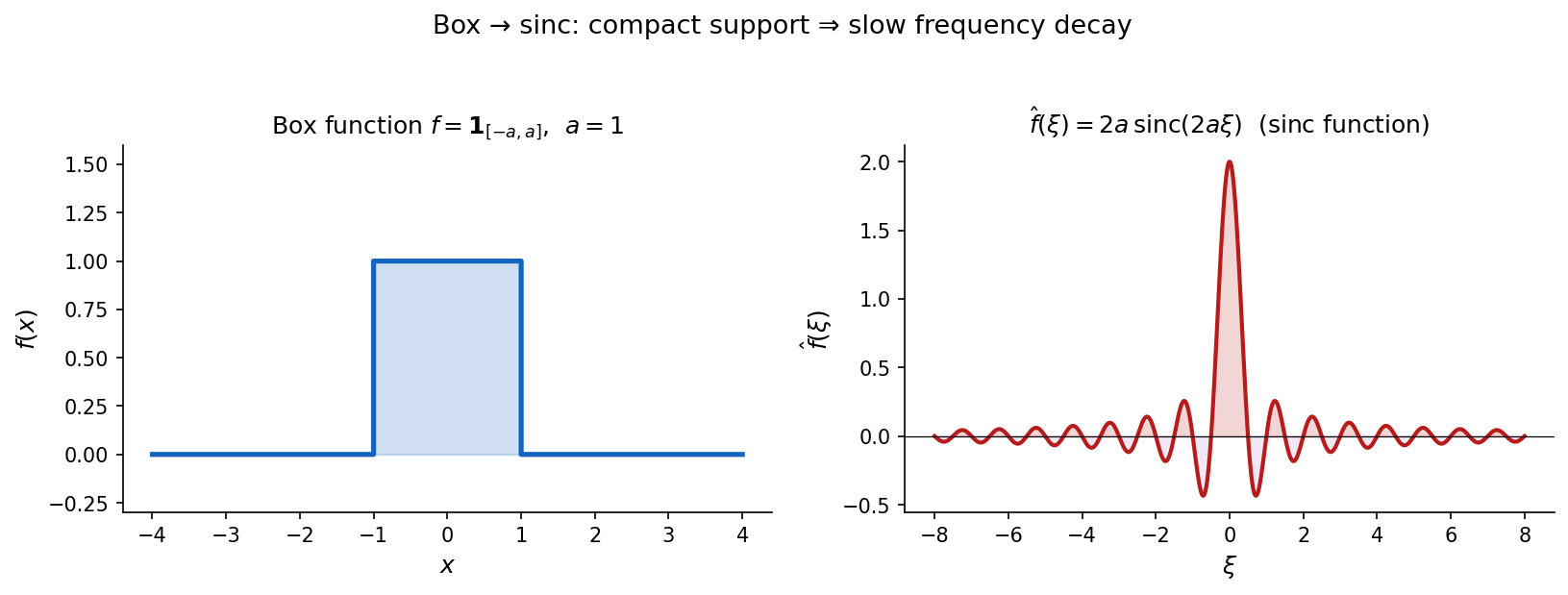
চিত্র ৪: বাঁয়ে \([-1,1]\)-এ ১ মানের box; ডানে sinc function — মাঝে ঊর্ধ্বে উঠে দুদিকে ক্রমশ কমে ক্ষুদ্র দোলায়। Compact support বনাম slow decay in frequency।
স্বজ্ঞা: Box function "হঠাৎ শেষ" হয় — discontinuity আছে। Frequency-domain-এ এই হঠাৎ থামা-র মানে হলো অনেক high-frequency component দরকার → sinc ধীরে কমে (\(1/\xi\) rate)।
৪. Fourier Inversion Formula (বিপরীত সূত্র)¶
এখন সবচেয়ে গুরুত্বপূর্ণ প্রশ্ন: \(\hat{f}\) জানলে কি \(f\) ফিরে পাওয়া যায়?
উপপাদ্য: Fourier Inversion Formula (ফুরিয়ে বিপরীত সূত্র)
\(f \in L^1(\mathbb{R})\) এবং \(\hat{f} \in L^1(\mathbb{R})\) হলে প্রায় সব \(x \in \mathbb{R}\)-এর জন্য:
অর্থাৎ forward transform-এর inverse হলো \(e^{+2\pi i x \xi}\) দিয়ে ফিরে integrate করা। (Axler 11.76)
প্রমাণের মূল idea (Axler §11C): Poisson kernel \(P_y(x) = \frac{1}{\pi} \frac{y}{x^2 + y^2}\) ব্যবহার করে। দেখানো যায় যে \(\int \hat{f}(\xi) e^{-2\pi y \lvert \xi \rvert} e^{2\pi i x \xi}\, d\xi = (P_y * f)(x)\) (Poisson integral)। যেহেতু \(\lVert f - P_y * f \rVert_1 \to 0\) as \(y \to 0\) (Axler 11.74) এবং \(\hat{f} \in L^1\) implies dominated convergence theorem প্রযোজ্য, তাই \(y \to 0\)-এ উভয় পক্ষ \(f(x)\)-এ converge করে প্রায় সব \(x\)-এর জন্য।
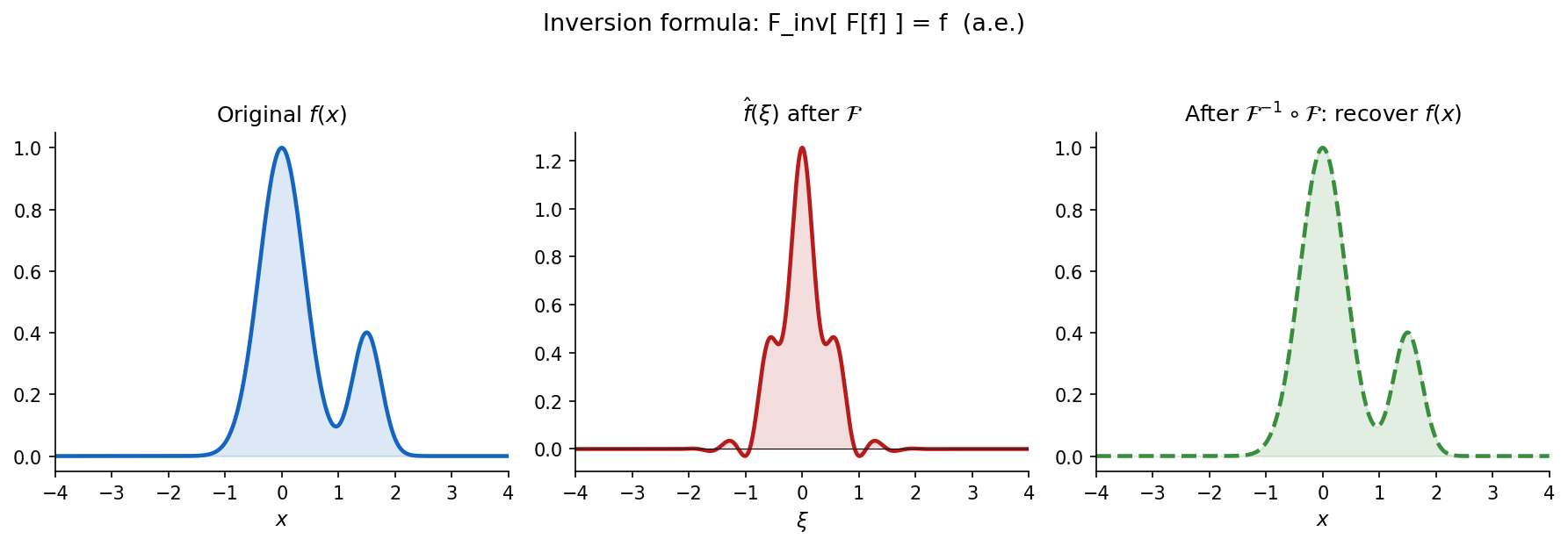
চিত্র ৫: বাঁয়ে মূল \(f(x)\); মাঝে \(\hat{f}(\xi)\); ডানে \(\mathcal{F}^{-1}[\hat{f}]\) — মূল function ফিরে আসে। Inversion formula-র ভিজ্যুয়াল প্রমাণ।
গুরুত্বপূর্ণ corollary: Fourier transform একটা one-to-one map — \(\hat{f} = 0\) মানেই \(f = 0\) (a.e.)।
৫. Convolution Theorem (সংযোজন উপপাদ্য)¶
সংজ্ঞা: Convolution on \(\mathbb{R}\) (সংযোজন)
\(f, g \in L^1(\mathbb{R})\) হলে তাদের convolution (সংযোজন) সংজ্ঞায়িত:
এবং \(f * g \in L^1(\mathbb{R})\) with \(\lVert f * g \rVert_1 \leq \lVert f \rVert_1 \lVert g \rVert_1\)।
উপপাদ্য: Convolution Theorem (সংযোজন উপপাদ্য)
\(f, g \in L^1(\mathbb{R})\) হলে:
অর্থাৎ convolution-এর Fourier transform = transform-দুটোর pointwise গুণফল। (Axler 11.66; Sternberg §3.2)
প্রমাণ: Fubini's theorem প্রয়োগ করে integration order বদলানো:
Substitution \(u = x - t\):
গুরুত্ব: Convolution একটা জটিল operation — দুটো function "blur" করে। কিন্তু Fourier domain-এ এটা মাত্র pointwise multiplication! Signal processing-এ এটাই filter design-এর মূল ভিত্তি।
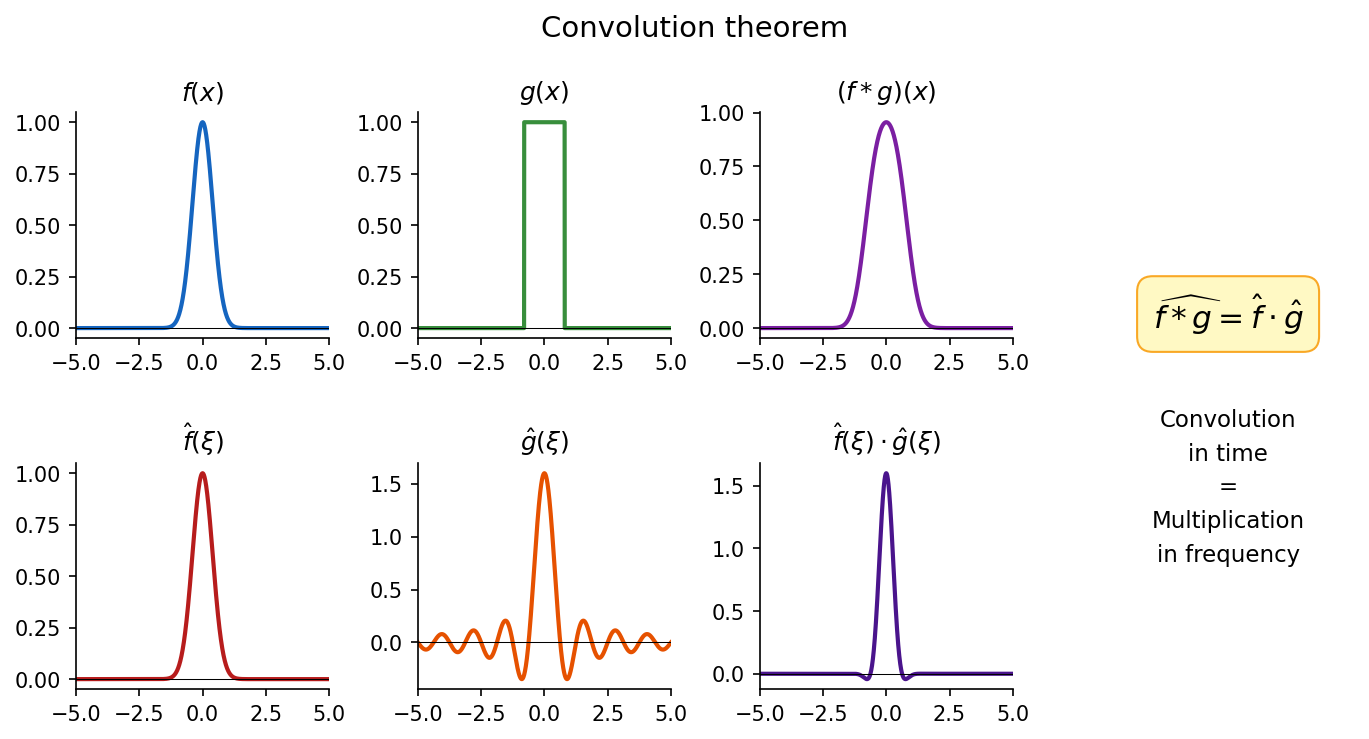
চিত্র ৬: উপরের সারিতে \(f\), \(g\), এবং \(f*g\) সময়-domain-এ; নিচের সারিতে \(\hat{f}\), \(\hat{g}\), এবং \(\hat{f}\cdot\hat{g}\) frequency-domain-এ। ডানে Convolution theorem-এর সারাংশ।
৬. Plancherel Theorem এবং \(L^2\) Fourier Transform¶
এতক্ষণ \(f \in L^1(\mathbb{R})\) ধরেছি। কিন্তু \(L^2(\mathbb{R})\)-তে থাকা function (energy-finite signals) সবসময় \(L^1\)-এ নেই। তবু তাদের Fourier transform সংজ্ঞায়িত করা যায় কি? হ্যাঁ — Plancherel-এর মাধ্যমে।
উপপাদ্য: Plancherel's Theorem (প্লাঁশেরেলের উপপাদ্য)
\(f \in L^1(\mathbb{R}) \cap L^2(\mathbb{R})\) হলে:
অর্থাৎ Fourier transform \(L^2\)-norm preserve করে। (Axler 11.82; Sternberg §3.7)
মূল idea: প্রথমে দেখাও যে যদি \(\hat{f} \in L^1\) হয়, তাহলে Inversion formula থেকে:
(Sternberg §3.7 — এটাকে "Parseval's identity"ও বলে।) সাধারণ ক্ষেত্রে Poisson kernel approximation দিয়ে prove করা হয়।
Consequence (পরিণতি): যেহেতু \(L^1(\mathbb{R}) \cap L^2(\mathbb{R})\) হলো \(L^2(\mathbb{R})\)-এর একটা dense subspace, Fourier transform-কে continuous extension-এর মাধ্যমে সমস্ত \(L^2(\mathbb{R})\)-এ extend করা যায়। Extended transform \(\mathcal{F} : L^2(\mathbb{R}) \to L^2(\mathbb{R})\) একটা unitary operator (একক অপারেটর) — isometric এবং surjective।
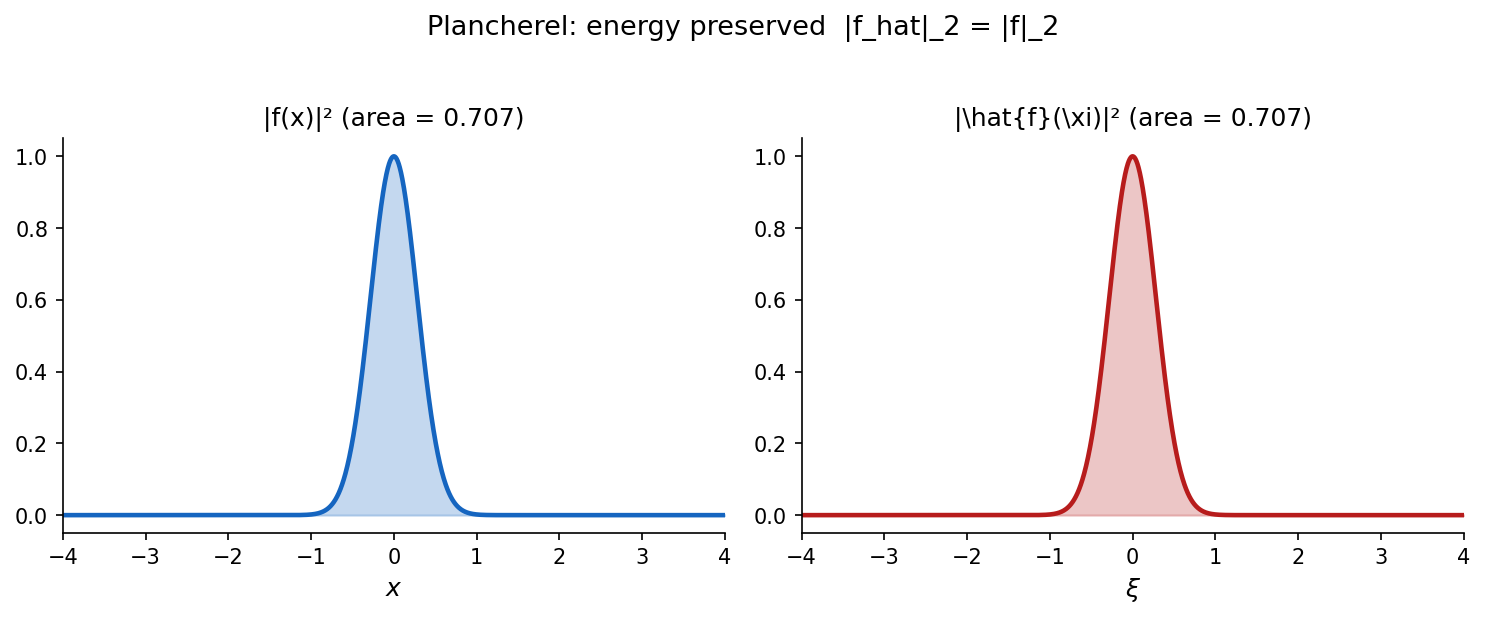
চিত্র ৭: বাঁয়ে \(\lvert f(x) \rvert^2\)-এর area (নীল); ডানে \(\lvert \hat{f}(\xi) \rvert^2\)-এর area (লাল)। দুটো সমান — Plancherel-এর visual প্রমাণ।
৭. Uncertainty Principle (অনিশ্চয়তার নীতি)¶
Heisenberg (হাইজেনবার্গ)-এর uncertainty principle quantum mechanics-এর কেন্দ্রীয় ধারণা — কিন্তু এর গাণিতিক শিকড় হলো Fourier analysis।
স্বজ্ঞা: যদি \(f\) "সংকীর্ণ" হয় (time-এ concentrate), তাহলে \(\hat{f}\) "প্রশস্ত" হতে হবে (frequency-তে spread)। এবং উল্টোটাও সত্য। দুটো একসাথে সংকীর্ণ হওয়া সম্ভব নয়।
উপপাদ্য: Heisenberg Uncertainty Principle
\(f \in L^2(\mathbb{R})\) এবং \(\lVert f \rVert_2 = 1\) হলে:
(Sternberg §3.10 — একটু ভিন্ন convention-এ \(\geq \frac{1}{4}\) লেখা হয়।)
প্রমাণের স্কেচ (Sternberg §3.10): Cauchy–Schwarz প্রয়োগ করা হয়:
Integration by parts থেকে \(\int x \frac{d}{dx} \lvert f \rvert^2\, dx = -\int \lvert f \rvert^2\, dx = -1\) এবং Plancherel থেকে \(\int \lvert f' \rvert^2\, dx = 4\pi^2 \int \xi^2 \lvert \hat{f} \rvert^2\, d\xi\)। এই দুটো মিলিয়ে inequality আসে।
Physical interpretation: position (অবস্থান)-এর uncertainty \(\Delta x\) আর momentum (ভরবেগ)-এর uncertainty \(\Delta p\)-এর গুণফল কখনো \(\hbar/2\)-এর চেয়ে ছোট নয় — \(\Delta x \cdot \Delta p \geq \hbar/2\)।
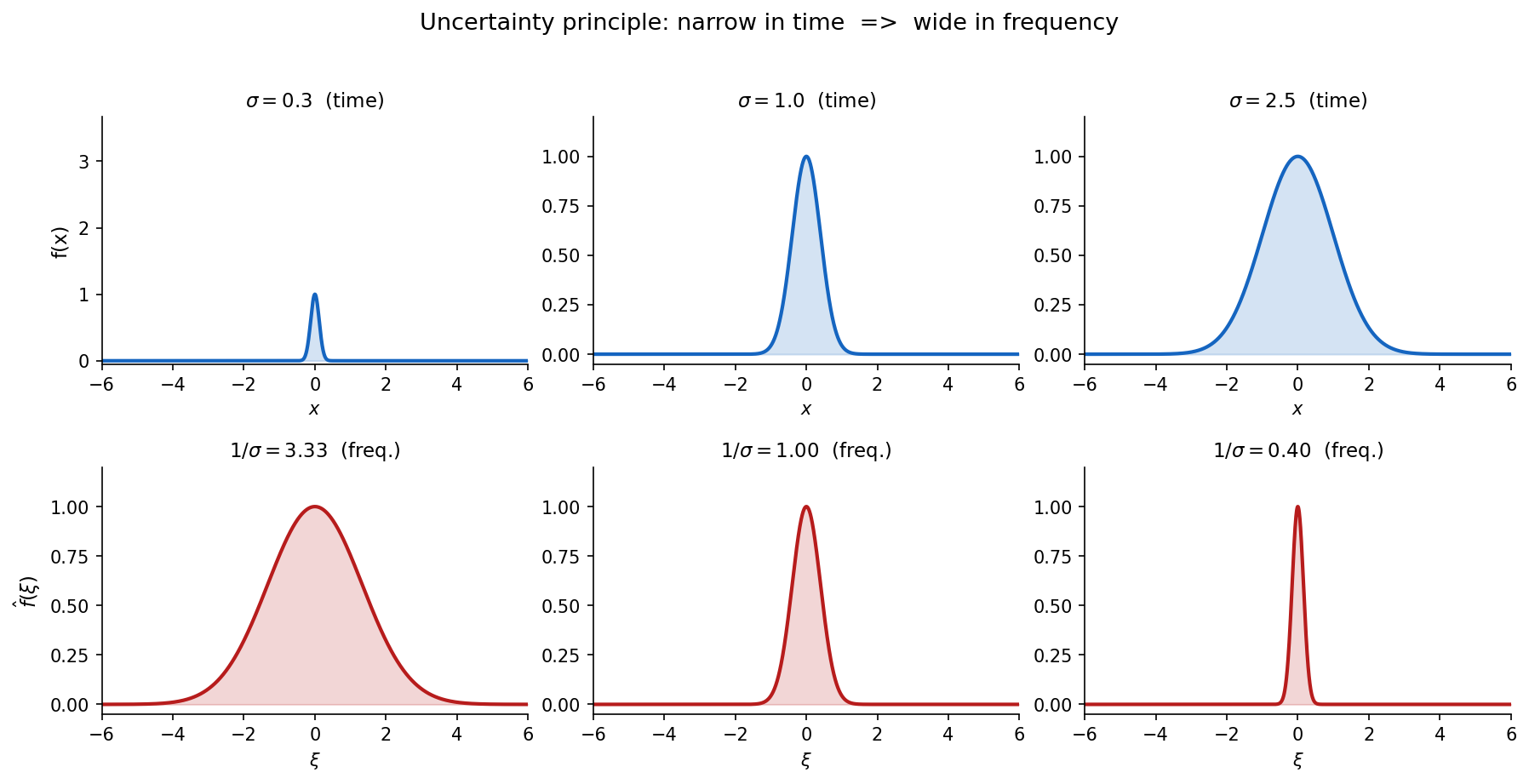
চিত্র ৮: তিনটি \(\sigma\)-র জন্য Gaussian। উপরের সারি: time-domain; নিচের সারি: frequency-domain। \(\sigma\) ছোট (সংকীর্ণ time) হলে frequency-তে প্রশস্ত (\(1/\sigma\)) — uncertainty principle সরাসরি দর্শনীয়।
৮. সাধারণ ভুল (Common Mistakes)¶
ভুল ১: Convention গুলিয়ে ফেলা। Fourier transform-এর তিনটি common convention আছে — exponent-এ \(\pm 2\pi i\) বা \(\pm i\), আর normalization factor। এই বইয়ে আমরা Axler-এর convention: \(\hat{f}(\xi) = \int f(x) e^{-2\pi i x \xi}\, dx\)। অন্য বইয়ের সাথে মেলাতে গেলে convention মিলিয়ে নাও।
ভুল ২: "\(f \in L^1\) হলেই \(\hat{f} \in L^1\)" মনে করা। এটা ভুল। Riemann–Lebesgue lemma বলে \(\hat{f}\) bounded এবং continuous এবং \(\to 0\) at infinity, কিন্তু \(L^1\)-এ থাকার কোনো guarantee নেই। উদাহরণ: \(f = \mathbf{1}_{[-1,1]}\)-এর transform sinc, যা \(L^1\)-এ নেই।
ভুল ৩: Plancherel-কে শুধু \(L^1\)-এ ভাবা। Plancherel theorem মূলত \(L^2\)-এর জন্য। \(f \in L^1 \setminus L^2\) হলে \(\lVert \hat{f} \rVert_2 = \lVert f \rVert_2\) কাজ করে না (কারণ \(\lVert f \rVert_2\) হয়তো infinite)।
ভুল ৪: Inversion formula সবসময় pointwise ভাবা। Inversion formula "almost everywhere" (প্রায় সর্বত্র) সত্য — Lebesgue measure-এর দৃষ্টিতে। \(f\) continuous হলে সব \(x\)-এ সত্য, কিন্তু সাধারণত নয়।
৯. এক্সারসাইজ (Exercises)¶
সমস্যা ১. দেখাও যে \(f(x) = e^{-2\pi \lvert x \rvert}\)-এর Fourier transform হলো \(\hat{f}(\xi) = \dfrac{1}{\pi(\xi^2 + 1)}\)।
সমস্যা ২. \(f \in L^1(\mathbb{R})\) এবং \(g(x) = f(x - b)\) হলে দেখাও \(\hat{g}(\xi) = e^{-2\pi i b \xi} \hat{f}(\xi)\)। (Translation → phase shift in frequency।)
সমস্যা ৩. \(f \in L^1(\mathbb{R})\) এবং \(g(x) = e^{2\pi i b x} f(x)\) হলে দেখাও \(\hat{g}(\xi) = \hat{f}(\xi - b)\)। (Modulation → frequency shift।)
সমস্যা ৪. Plancherel theorem ব্যবহার করে দেখাও: \(\int_{-\infty}^{\infty} \mathrm{sinc}^2(x)\, dx = 1\), যেখানে \(\mathrm{sinc}(x) = \dfrac{\sin(\pi x)}{\pi x}\)। (Hint: কোন function-এর transform হলো sinc?)
সমস্যা ৫. \(f, g \in L^2(\mathbb{R})\) হলে প্রমাণ করো Parseval's identity:
(Hint: polarization identity ব্যবহার করো।)
সমস্যা ৬. \(f(x) = x e^{-2\pi x} \mathbf{1}_{[0,\infty)}(x)\) হলে \(\hat{f}(\xi)\) বের করো। (Axler exercise 6।)
সমস্যা ৭. প্রমাণ করো যে Fourier transform \(\mathcal{F} : L^2(\mathbb{R}) \to L^2(\mathbb{R})\) একটা unitary operator — অর্থাৎ \(\mathcal{F}^* = \mathcal{F}^{-1}\)।
সমস্যা ৮. Uncertainty principle-এর সমতার (equality) শর্ত কী? কোন function-এ \(\Delta x \cdot \Delta \xi\) minimize হয়?
১-নং সমাধান দেখাও
\(f(x) = e^{-2\pi \lvert x \rvert}\)। আলাদা করে \(x \geq 0\) আর \(x < 0\):
প্রথম integral: \(\displaystyle\int_0^{\infty} e^{-2\pi x(1 + i\xi)}\, dx = \frac{1}{2\pi(1 + i\xi)}\)
দ্বিতীয় integral: \(\displaystyle\int_{-\infty}^{0} e^{2\pi x(1 - i\xi)}\, dx = \frac{1}{2\pi(1 - i\xi)}\)
যোগ করলে:
২-নং সমাধান দেখাও
\(g(x) = f(x - b)\) হলে:
\(u = x - b\) substitution করলে \(x = u + b\), \(dx = du\):
৩-নং সমাধান দেখাও
\(g(x) = e^{2\pi i b x} f(x)\) হলে:
৪-নং সমাধান দেখাও
\(f = \mathbf{1}_{[-1/2, 1/2]}\) নিই। তাহলে:
Plancherel theorem: \(\lVert \hat{f} \rVert_2^2 = \lVert f \rVert_2^2\)
৫-নং সমাধান দেখাও
Polarization identity: \(\langle f, g \rangle = \frac{1}{4}\bigl(\lVert f+g \rVert^2 - \lVert f-g \rVert^2 + i\lVert f+ig \rVert^2 - i\lVert f-ig \rVert^2\bigr)\)
Plancherel theorem বলে \(\lVert h \rVert_2 = \lVert \hat{h} \rVert_2\) সব \(h \in L^2\)-এর জন্য।
তাই \(\lVert f + g \rVert_2^2 = \lVert \hat{f} + \hat{g} \rVert_2^2\) ইত্যাদি।
Polarization identity প্রয়োগ করলে:
অর্থাৎ \(\displaystyle\int f \bar{g}\, dx = \int \hat{f} \overline{\hat{g}}\, d\xi\) \(\square\)
৬-নং সমাধান দেখাও
\(f(x) = x e^{-2\pi x} \mathbf{1}_{[0,\infty)}(x)\):
Let \(\alpha = 2\pi(1 + i\xi)\). Integration by parts with \(u = x\), \(dv = e^{-\alpha x} dx\):
তাই:
(Axler 11C exercise 6 এর সাথে মেলে।)
৭-নং সমাধান দেখাও
Plancherel theorem: \(\lVert \mathcal{F} f \rVert_2 = \lVert f \rVert_2\) — তাই \(\mathcal{F}\) isometric।
Parseval identity (exercise 5): \(\langle \mathcal{F} f, \mathcal{F} g \rangle = \langle f, g \rangle\) — তাই \(\mathcal{F}^* \mathcal{F} = I\)।
Surjectivity: Inversion formula দেখায় \(\mathcal{F}^{-1}\) exist করে। তাই \(\mathcal{F} \mathcal{F}^* = I\)।
যেহেতু \(\mathcal{F}^* \mathcal{F} = \mathcal{F} \mathcal{F}^* = I\), তাই \(\mathcal{F}\) unitary \(\square\)
৮-নং সমাধান দেখাও
Uncertainty inequality-তে সমতা হয় Cauchy–Schwarz-এ সমতার শর্তে, অর্থাৎ যখন \(x f(x)\) এবং \(f'(x)\) proportional:
এই ODE সমাধান: \(f(x) = A e^{-cx^2/2}\)।
তাই Gaussian function-এই uncertainty minimize হয় — এবং সেটা exactly \(\frac{1}{16\pi^2}\) পরিমাণ।
এটাই কারণ Gaussian-কে "optimal signal" বলা হয় — time আর frequency উভয় দিকে সবচেয়ে concentrate।
১০. সারসংক্ষেপ ও Checklist¶
এই অধ্যায়ের মূল ফলাফলগুলো:
- [ ] Fourier transform: \(\hat{f}(\xi) = \int f(x) e^{-2\pi i x \xi}\, dx\) — \(L^1(\mathbb{R})\)-এ সংজ্ঞায়িত।
- [ ] Riemann–Lebesgue: \(\hat{f}\) bounded, uniformly continuous, এবং \(\hat{f}(\xi) \to 0\) as \(\xi \to \pm\infty\)।
- [ ] Gaussian → Gaussian: \(\mathcal{F}[e^{-\pi x^2}] = e^{-\pi \xi^2}\) — নিজেই নিজের transform।
- [ ] Box → sinc: indicator function-এর transform হলো sinc — compact support বনাম slow frequency decay।
- [ ] Inversion formula: \(\hat{f} \in L^1\) হলে \(f(x) = \int \hat{f}(\xi) e^{2\pi i x \xi}\, d\xi\) (a.e.)।
- [ ] Convolution theorem: \(\widehat{f * g} = \hat{f} \cdot \hat{g}\) — সবচেয়ে useful property।
- [ ] Plancherel: \(\lVert \hat{f} \rVert_2 = \lVert f \rVert_2\) — FT extends to unitary operator on \(L^2(\mathbb{R})\)।
- [ ] Uncertainty principle: \(\Delta x \cdot \Delta \xi \geq \frac{1}{4\pi}\) — Gaussian-এ সমতা।
➡️ পরের অধ্যায়: 6.1 — Real ও Complex Measure; Total Variation — Part 6 শুরু।